 The Transerve solution for location intelligence is now
The Transerve solution for location intelligence is now 
Press Release
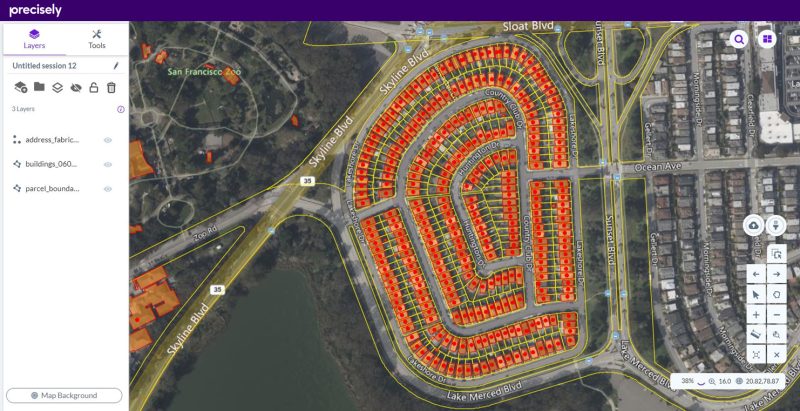
Precisely Strengthens its Location Intelligence Offering Through the Acquisition of Transerve
The acquisition provides SaaS visualization, data enrichment and analysis capabilities to help businesses derive important spatial context for faster, more confident business decisions
Read the press release